Writing about 4 Legs Spider Raspberry Pi Robot for educational and informational purposes only. however, do not hesitate to use this information on your own risk as we make no warranty of any kind.
Design:
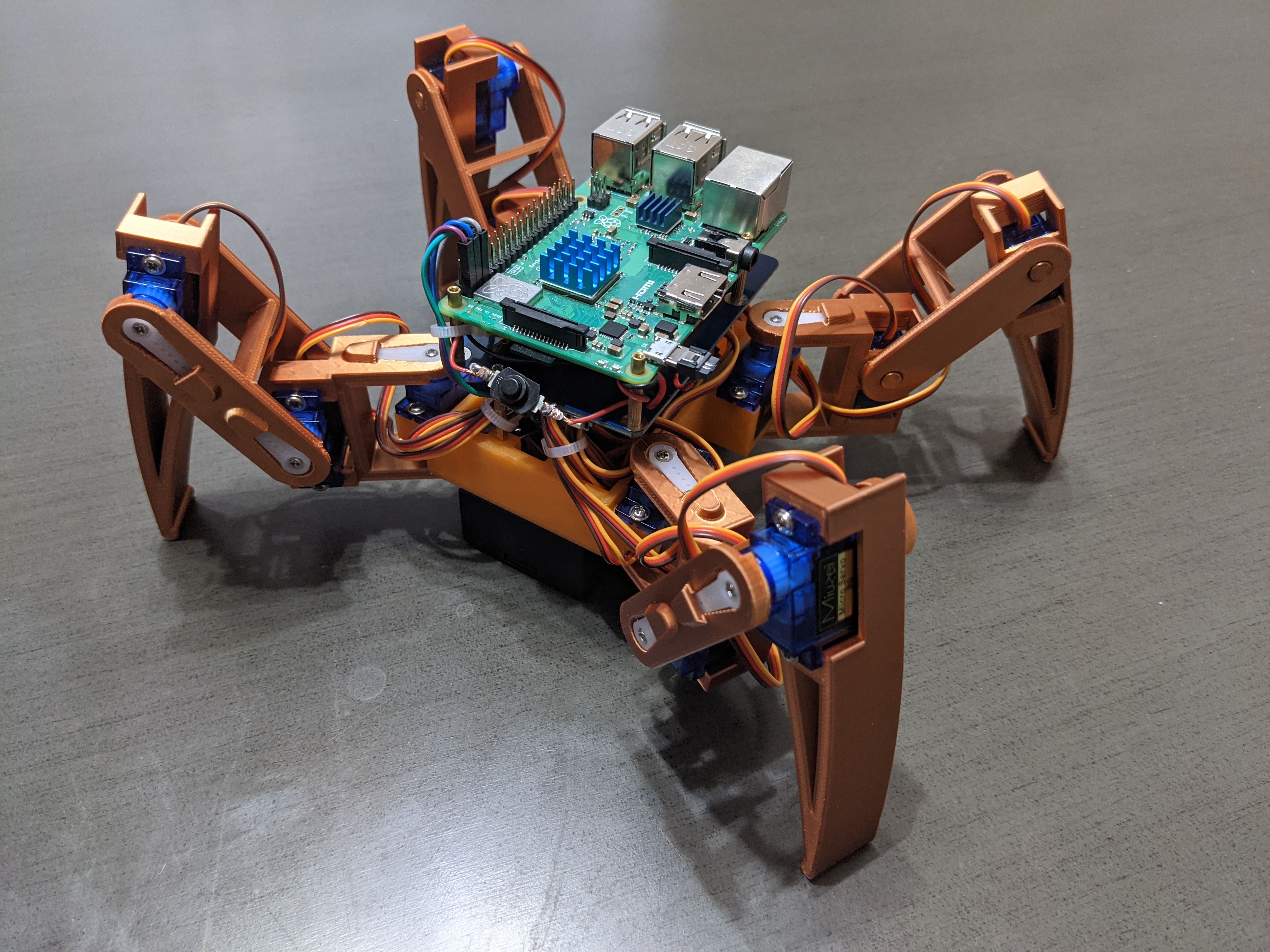
3D printed this Robot using PLA filament on my Ender3 printer. I modified the original design by manic-3d-print Thank you, this was a great help to get me started.
A major challenge was the weight, SG90 servos are not heavy duty. I needed Separate power for the 12 servos and another for the Pi. Finding powerful enough battery while being light weight 18650 to the rescue.
Balance is another thing to consider, since you are working with 4 legs you can only move one at a time leaving you with 3 legs shaping a letter "Y"
Power:
Weight and Balance again being the focus while keeping good performance the 18650 was my best option for the servos while using a Lithium Battery Power Module for the Raspberry Pi
I tried power banks and other types of batteries and settled on the 18650. It is best to separate the raspberry pi power from everything else so it doesn’t restart due to low voltage when the motors are fully loaded. Wiring:
Using a DuPont cable to connect the Pi to PCA9685 16 CH 12Bit PWM Servo Motor Driver Board then the 12 SG90 servos to the driver board Software:
Python code to drive it from my phone using the bluedot API and phone app.
Component list of the parts used:
Raspberry Pi3 Model B – this is the brain on the robot
PCA9685 16 CH 12Bit PWM Servo Motor Driver Board
12 SG90 Servos
2 x 18650 rechargeable batteries
DuPont cables
3D Printed chassi
All content and information on this web site is intended for educational and entertainment purposes only.