Writing about Popsicle Sticks Weird Robot for educational and informational purposes only. however, do not hesitate to use this information on your own risk as we make no warranty of any kind.
Design:
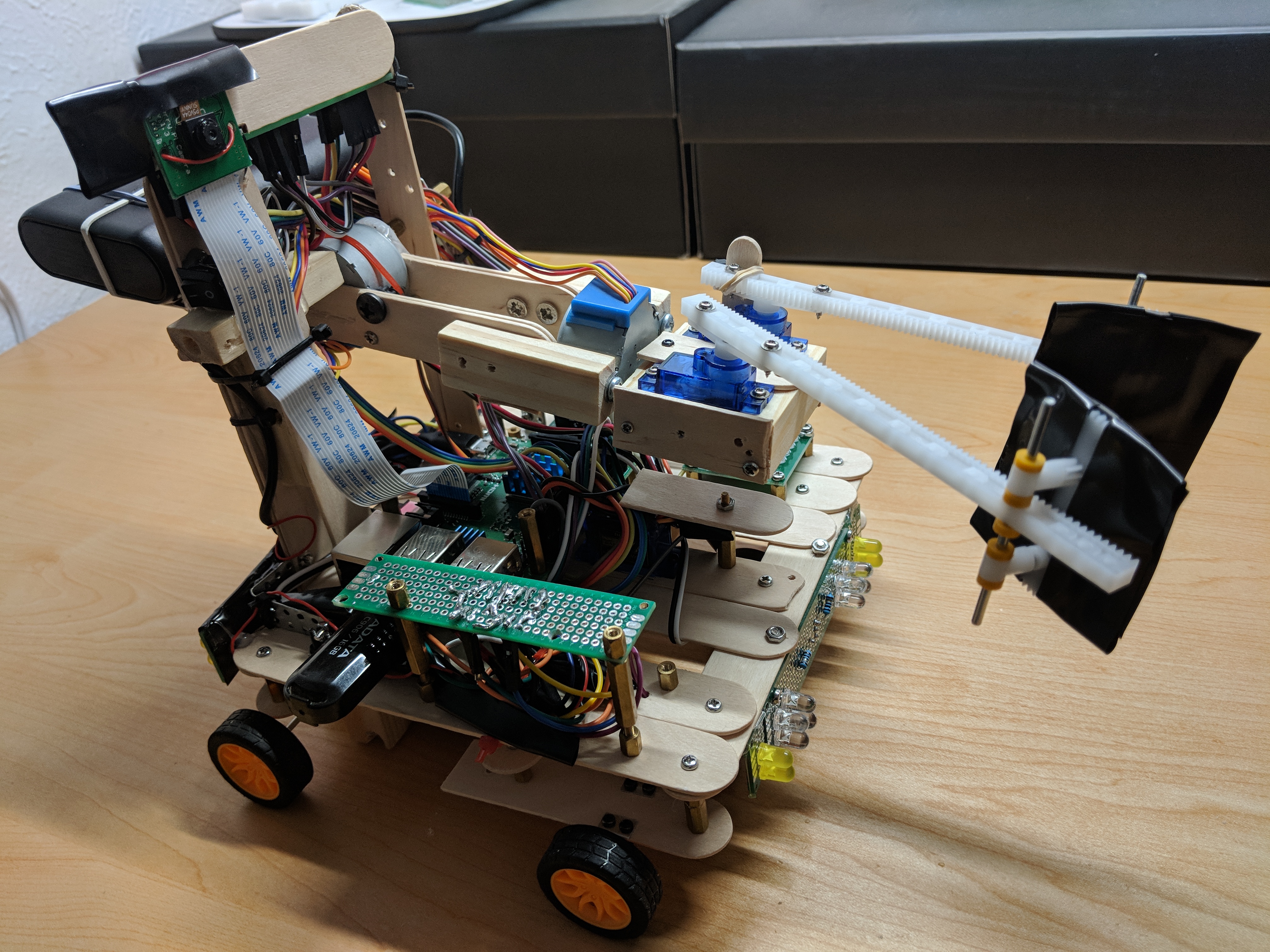
This was before having a 3D printer so I used a popsicle sticks for the build, they are cheap and easy to work with. You will need a mini screws and a hot glue gun for this build. Overall this is a good cheap way to start your project but for a better result bet a 3D printer. Power:
Using a 10000 mAh power bank was the choice to power the Robot and balance the lifting arm, the down size to this approach is having one power source for everything so the battery drain faster.
Avoid connecting the Raspberry Pi and the motors to the same power source as that can cause the Pi to restart when the voltage drops. Wiring:
Using a DuPont cable for most connections Software:
Using the Raspberry Pi3 Model B, Java SE code to drive it from my PC over WiFi remote connection.
Component list of the parts used:
Raspberry Pi3 model B – this is the brain on the robot
10000 mAh Power Bank - This is powering everything - Not recommended
L293D DC motor driver - To drive forward and backward
2 x SG90 Servo motor - For the grip
2 x DC motors and tires - To drive forward and backward
2 x Stepper motor - To Raise and lower the arm and to rotate the grip
2 x Stepper motor Driver Board
2 x Stepper motor Driver Board
5 x PCB board
24 x LED
Raspberry Pi Camera
Popsicle Sticks and mini screws chassi
All content and information on this web site is intended for educational and entertainment purposes only.